MH Projektseite
10" F/6 Newton Telescop mit Gabelmontierung
Diese Seite ist eine Sammlung aus Plänen, Dokumentationen und
Links die ich für mich selbst zusammengestellt habe.
Die Ausgangsbasis
Kit mit F/6 vorgeneriertem
Glasrohling von Dan Cassaro
aus Florida
(ca. 100$, wobei 1/3 Versandkosten waren).
Inhalt:
- 10" Glasrohling, mittels CNC vorgeneriert in einer mit
Styropor ausgepolsterten Holzkiste
- rud zugeschnitte Matte mit Fliesen für das Tools
- Schleifpulver
- Caborundum Pulver: #80 / #120 / #220
- Aluminium Oxyd: 5T / 12T / 25T / 40T
- Polierpulver
- Polierpads
- Polierpech
- Ronchigitter
|
 |
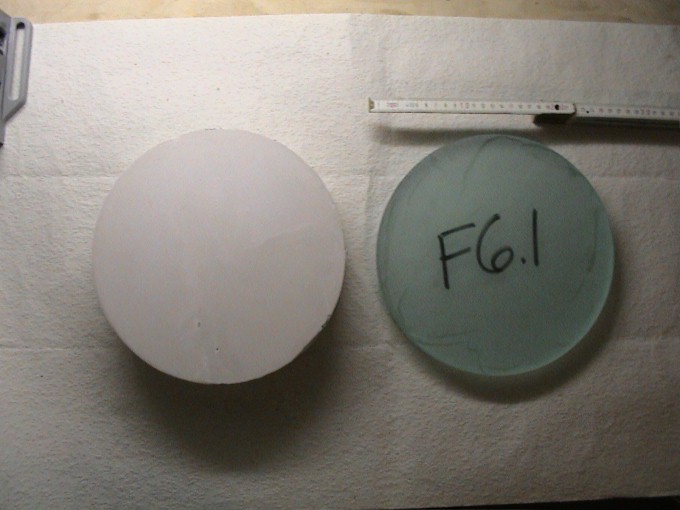
Schritt 1: Schleifwerkzeug herstellen
Die Glasscheibe habe ich mit
einem erhöhten Rand aus Alufolie versehen und dann mit Gips
ausgegossen um die Grundlage für das Tool zu erstellen.
Die Glasscheibe und ihr Gips-Abguss, bevor er mit Epoxyd wasserdicht
gemacht wird sind im Foto festgehalten.
|
 |
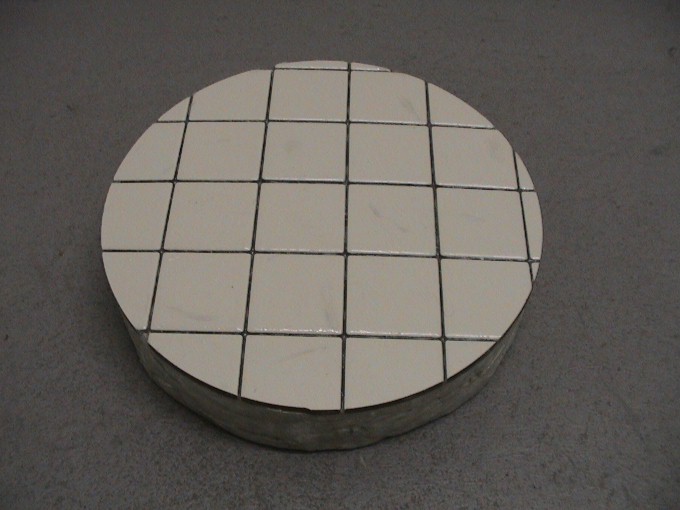
| Mit Epoxyd wird auch die
Fliesenmatte
auf das Gips-Tool geklebt und die Fugen ausgegossen.
Wasserdicht und fertig für den ersten Grobschliff.
|
|
Schleifprotokoll
2006 Mai 25:
Bevor ich den Feinschliff
angehe, habe ich beschlossen die
Spiegel-Zelle zu bauen. Ich habe die Befürchtung, dass der Spiegel
sonst beim Einpassen leiden könnte. Ich habe mich für die
Konstruktion einer 9 Punkt Zelle mit Dreieck-Lagerungen entschieden
(siehe auch hier).
Bauplan: Das T (blaue Linien in Diagam) wird aus 30x30 Vierkantrohr
geschweißt. Drei Gewindebohrungen nehmen die Kugelgelenken auf,
welche dann die Dreiecke tragen. an dem T werden Winkel montiert, die
den Spiegel am Verrutschen hindern. Klettbänder an den Winkeln und
am Spiegel sollen ihn am herauskippen hindern.
|
|
Fangspiegel und Fokus
Ich bin mir noch nicht schlüssig, ob ich den Kaufen oder selbst
herstellen soll. Für letztes müsste ich mich entschieden
haben, bevor der Hauptspiegel aluminisiert wird.
Der Fokus könnte aus einem defekten ausgeschlachteten (also alle
Linsen entfernt) Objektiv mit Geradführung der Frontlinse
gefertigt werden. Vorteile:
- Exakte Fokussierung möglich.
- Kameramount schon inclusive
- Befestigung einfach, z.B. durch Schrauben an einer
Metallsonnenblende.
Die Montierung



Das Grundgestell. Geplant sind weitere Versteifungselemente.
Spiegelzelle, Sekundärspiegel, Fokussiereinheit und Motoren sind
noch nicht montiert.
Ziel war für mich eine Montierung die ich in wenigen Minuten
zerlegen, bzw. zusammenklappen kann, damit ich sie im Kofferraum meines
Autos transportieren kann.
- Der Ständer kann zusammengeklappt werden und ist dann sehr
flach. Er ist seh stabil, schwingt aber etwas.
- Die Gabel wird mit einer großen Mutter an der
kugelgelagerten Achsebefestigt. Die Aluminiumprofile schwingen stark.
Hier sind noch Versteifungen notwendig, oder ich werde die Gabel auch
aus verschweißten Eisenprofilen fertigen.
- Der "Fangspiegelkasten" und "Tubus" kann abgeschraubt werden. Das
Verhalten dieser Elementen kenne ich noch nicht genau, da das Schwingen
der Gabel zu stark ist :-(
Nachführung mit Schrittmotoren
Die Positionierung und Nachführung wird mit Gewindestangen
realisiert. Die Mechanik vereinfacht sich, aber es geht dann nicht mehr
ohne Trigonometrie. Leider schränkt sich auch
der Drehbereich ein (ca. 150o maximal möglich).
 |
Der Zusammenhang zwischen Gewindestangenposition und
resultierendem
Winkel ist dann (t=Zeitabhängigkeit bei Nachführungsachse):
xt=( r2 + R2 + 2 r R
cos(at)1/2
Die Ansteuerung der Schrittmototen muss diesen Zusammenhang
berücksichtigen, wobei der Abstand zwischen zwei Schritten linear
mit xt zusammenhängt:
TSchritt= A xt
|
Da die Gewindestange eine lange Zeit für Positionierungen brauchen
würde ist eine zweite gröbere Motorisierung für die
Positionierung sinnvoll, z.B. ein Schneckenrad o.ä..
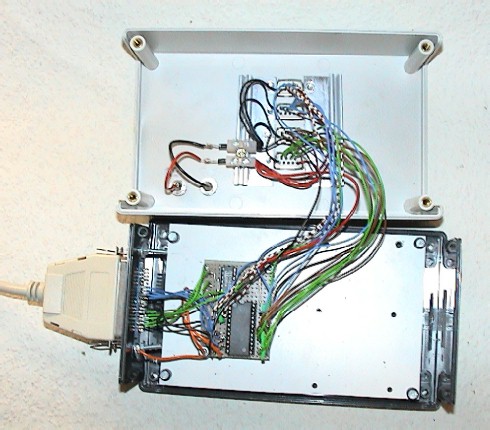
Elektronik
Die Kopplung an den PC über die Parallele Schnittstelle stellt mit
dem Portmultiplexer 8243 genug I/O-Ports
für die Steuerung der Schrittmotoren bereit (es ist noch Platz
für einen zweiten I/O Baustein). Die genaue Funktion ist in einem Artikel von F.J. Deck beschrieben.
Die Leistungsstufe wird je nach Motorausführung mit eine FETs oder
Leistungs ICs ausgeführt.
Prinzipschaltung mit einem 8243
Ein zweiter IO-Expander kann über CS an P7 zugeschaltet werden.
Der Verdrahtungsaufwand ist dann aber schon ziemlich hoch! |

 |
Eine einfache Leistungsstufe zur Ansteuerung von Schrittmitoren mit TTL
Pegel (z.B. aus der 8243er Schaltung von oben):
Unipolar:
 |
Bipolar:
 |
Die Schaltungen sind einfach auf Lochrasterplatinen zu realisieren
und die Elektronikbausteine sind sehr preiswert. Gute
leistungsfähige Schrittmotoren sind teuer und ich suche noch den
perfekten Motor.
Literatur
Bezugsquellen
- Dan Cassaro:
Verkauft vorgenerierte Glasrohlinge mit Schleifkits (preiswert und gut)
- Newport Glass:
Verkauft alles was man für ATM braucht
- VDS:
Hat 'ne gut sortierte Materialzentrale